 返回首页
返回首页
CCF智能机器人专业组|“机器人智能”论坛第八期活动成功举办
“机器人智能”论坛是由中国计算机学会(CCF)和中国人工智能学会(CAAI)联合主办的机器人与人工智能领域的高端学术讲堂。论坛旨在为科研人员、工程师、高校师生以及相关政府决策者提供机器人和人工智能领域的最新成果、学术动态和未来发展的平台,促进跨领域学术交流、学术界与工业界深度合作以及大众创新创业。
2020年12月27日上午9:00,“机器人智能”论坛第八期活动按时开始,首次以线上线下混合的形式分享了精彩报告。
论坛上半场的第一个报告,浙江大学的熊蓉教授带来了题为《长期鲁棒视觉导航研究:从准确定位到场景理解》的精彩报告。

熊教授首先阐述了长期鲁棒自主移动的两个核心问题与难点,即:移动方式和导航方式。并进一步指出,定位问题并不是SLAM(同时定位与建图)的子问题,现实应用场景中的定位解决方案本质上是简化了定位问题(如,增加锚点、降低精度要求等)。

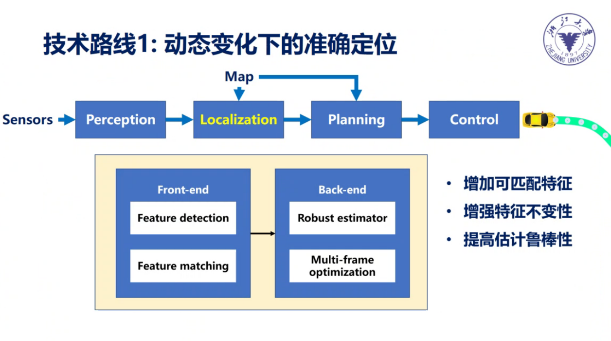
其中,利用激光雷达进行定位,已经有比较好的结果,但利用视觉信息进行定位,仍面临着图像易受环境变化影响的挑战。


面对这一挑战,熊教授总结了两类技术路线。一方面围绕如何减少环境动态变化引起错误视觉特征匹配的问题,提出了提高视觉特征不变性的方法、以及高匹配错误率下的鲁棒估计方法。另一方面,考虑到准确鲁棒导航是最终目标,提出模拟人类的驾驶行为,在导航应用程序提供粗略定位和粗略规划的基础上,通过对场景的导航语义理解,实现陌生环境下的自动驾驶。

论坛上半场的第二个报告,清华大学的孙富春教授带来了题为《智能机器人的研究与展望》的精彩报告。
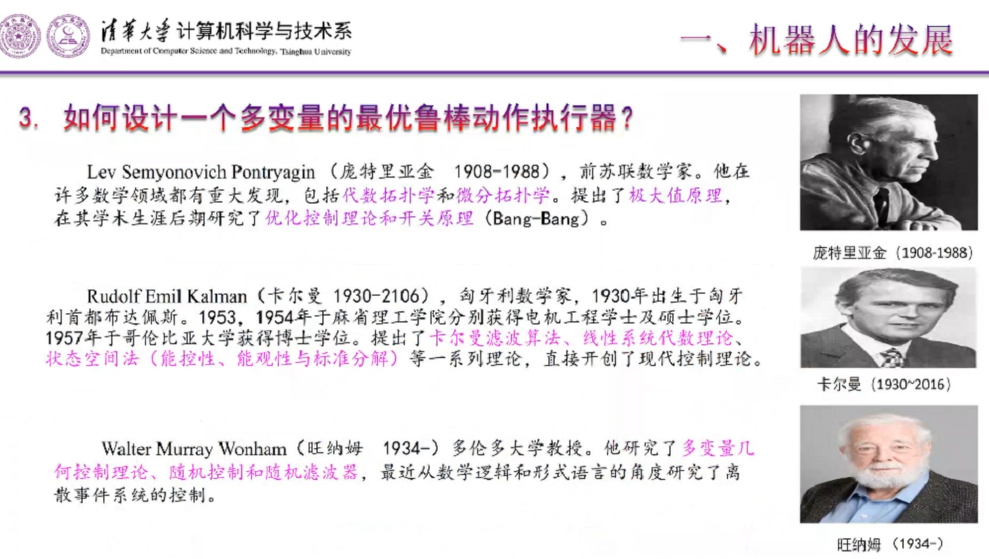
孙教授首先回顾了机器人的发展,从最古老的计数工具,到经典的控制理论,再到人工智能的出现。

孙教授总结认为,当前的人工智能实现的智能体,还只是感知到动作的映射,没有考虑感知和行为过程的复杂性。而下一代人工智能,应当形成知行体(Bcent),使得传感、信息中枢和动作组成学习、协同和提升的统一体。


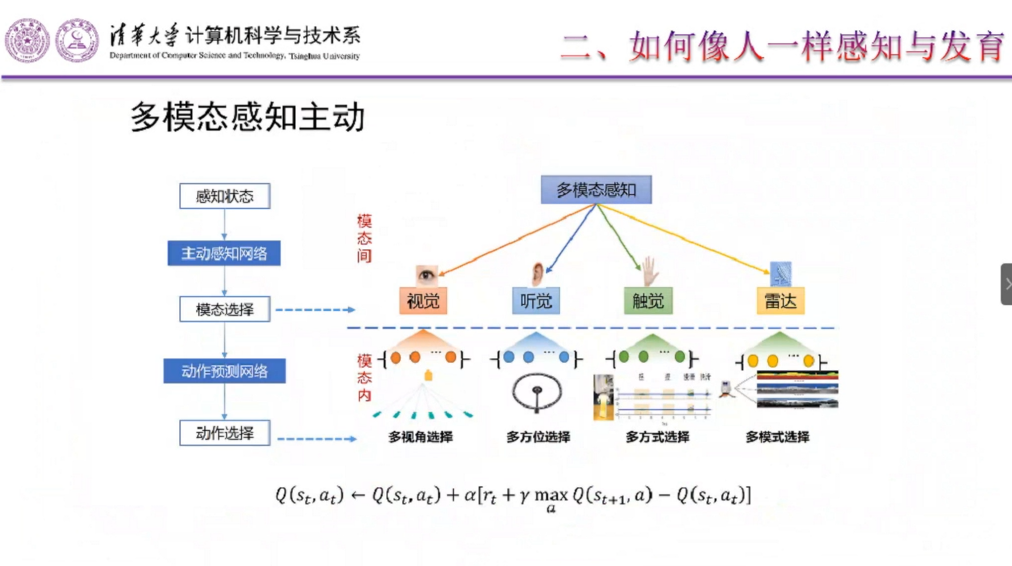
更进一步,孙教授从机器人“如何像人一样感知和发育”、“如何像人一样理解行为”、“如何像人一样模仿行为”三个角度,阐述了知行体的技术内涵。

论坛下半场的第一个报告,上海交通大学的杨明教授带来了题为《基于环视的智能车环境感知》的精彩报告。
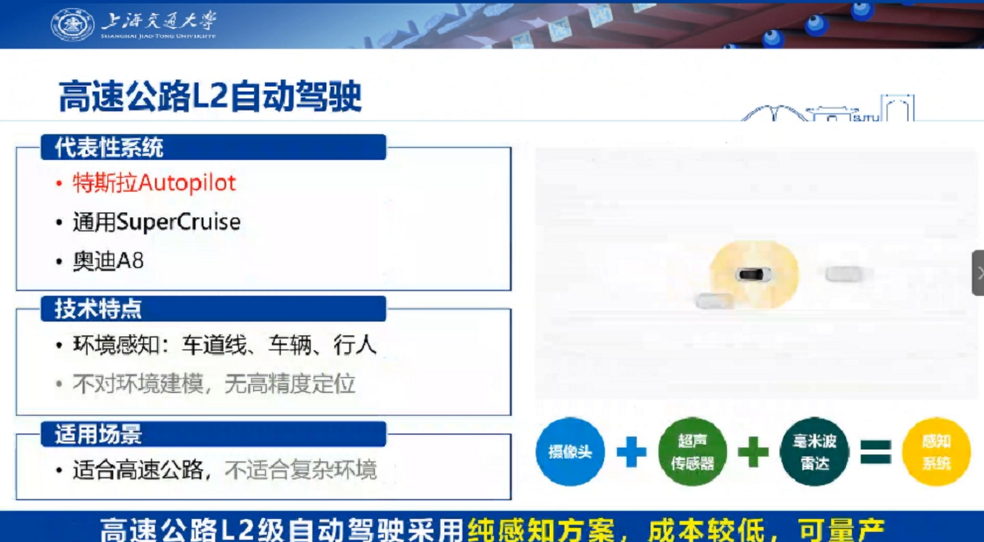
杨教授首先指出,智能汽车已经成为政务、学术界、产业界共同关注的颠覆性技术。其中,高速公路上的L2级自动驾驶,由于其任务结构化、车辆稀疏等特点,已经实现产业落地,但更复杂的场景中则亟需对环境进行感知。

接下来,杨教授介绍了其团队研发的环视平台,及其在自动泊车场景的应用,并进一步介绍了基于环视的感知与定位平台上各模块的具体技术。


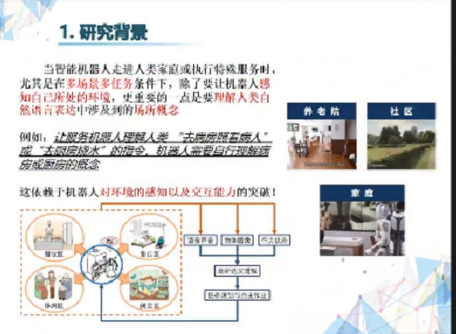
论坛下半场的第二个报告,东南大学的李新德教授的博士生李沛带来了题为《共融交互中的机器人语义场所感知与理解》的精彩报告。

报告首先介绍了研究背景,通过人机共融,使得机器人能够实现具有跨领域、多任务、多场景的执行能力。并进一步指出了三个层面的问题挑战,即:复杂的环境信息、如何感知多模态信息、如何利用线索识别场景。
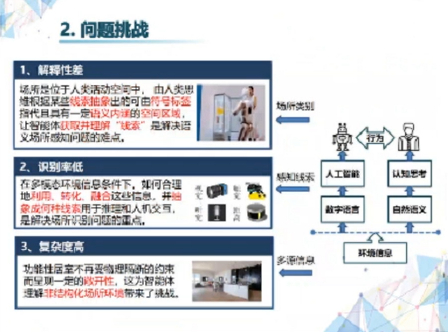
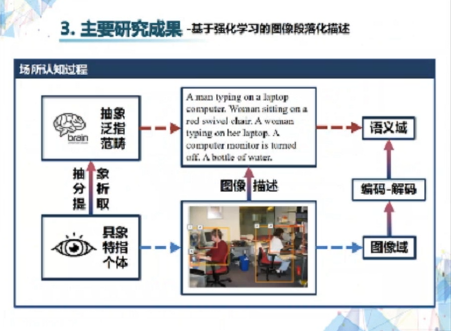
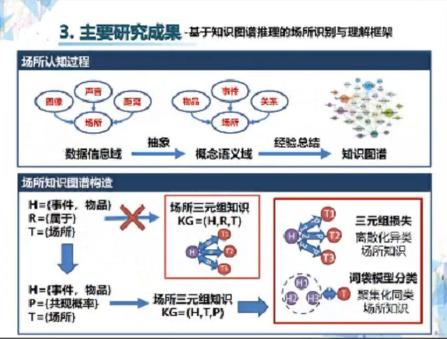
报告进一步介绍解决三个方面挑战的研究成果。从仿人的角度出发对场所感知与理解问题进行了分析研究,形成以语义线索为核心,结合多源信息融合技术,依托知识图谱推理方法的场所感知框架。

本次论坛报告的回看视频将会通过CCF和CAAI的电子资源向会员免费开放。
“机器人智能”论坛后续将每月举办一次,欢迎大家持续关注!



