返回首页
返回首页
CCF CAD&CG专委会暨 CSIAM GDC专委会走进广东工业大学——“面向智能机器人的图形计算”主题讲座
2020年12月28日(星期一)下午,CCF CAD&CG专委会暨CSIAM GDC专委会成员山东大学教授屠长河教授、中国科技大学教授刘利刚教授、国防科技大学教授徐凯教授、深圳大学特聘研究员胡瑞珍博士受邀来访广东工业大学计算机学院,并在广东工业大学工学一号馆216进行了主题为“CCF走进高校——面向智能机器人的图形计算”的学术讲座。本次讲座由广东工业大学计算机学院谢光强教授、刘冬宁教授及孟敏副教授主持。

刘冬宁教授主持

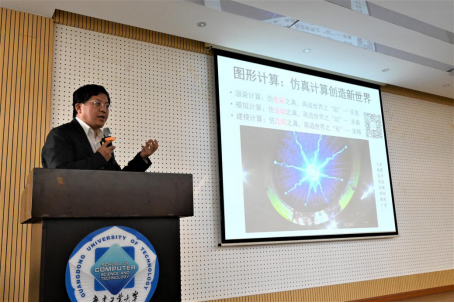
讲座现场
屠长河教授首先上台进行“智能机器人三维认知与交互技术”的学术报告。屠教授先对机器人的功能和现状进行了生动形象的介绍,提出并分析了如今机器人的五大问题:细粒度物体识别、机器人抓取、物体角度识别、场景理解和机器人协作问题。以其中的机器人抓取和机器人协作为例展示了山东大学交叉研究中心的研究成果,并对计算机图形学、3D视觉、机器学习等领域在智能机器人的应用做了简单展望。报告内容深入浅出,参加师生认真学习并就有关问题进行了讨论。

屠长河教授报告“智能机器人三维认知与交互技术”

师生交流互动

谢光强教授主持
随后,刘利刚教授上台进行了以“机器人自主三维场景探索与扫描”为主题的学术报告。刘教授提出了一种全新的自主场景三维重建的方法,通过为自动扫描提供基于物体感知的引导,使得对未知场景的探索、重建和理解能在一次扫描中完成。此外,刘教授还针对不完全重建点云的语义理解问题,介绍了通过多类图分割最小化方法来同时求解物体分割和物体识别的新思路。报告的最后视频展示了他们团队的实验成果,并与在座师生进行了交流。
刘利刚教授报告“机器人自主三维场景探索与扫描”

师生交流互动
紧接着进行学术汇报的嘉宾是徐凯教授,徐教授报告的题目是“带约束深度强化学习求解在线3D装箱问题”。针对在线装箱问题,徐教授讲述了“Actor-Critic”框架下带约束策略学习方法的设计思路,并结合实验结果说明该方法相较于传统方法的优点。报告结束后还与师生进行了进一步的交流。

孟敏副教授主持

徐凯教授报告“带约束深度强化学习求解在线3D装箱问题”

师生交流互动
最后,来自深圳大学的特聘研究员胡瑞珍博士进行了以“几何引导的机器人交互与规划”为题的报告。胡博士讲述了机器人与三位环境的交互性对提升机器人智能化水平的影响,并介绍了基于残缺扫描点云的物体部件运动性估计算法。此外,胡博士还分享了基于强化学习的无人智能物流案例的解决方案,在报告主题下与师生进行了热烈交流互动。

胡瑞珍博士报告“几何引导的机器人交互与规划”

师生交流互动
会议期间,CCF CAD&CG专委会举行了嘉宾颁奖仪式。




颁奖仪式
在“CCF走进高校”系列活动中,四位报告嘉宾结合各自的研究领域与工业需求向参会的师生会员们分享了自己的学术成果。在精彩的学术报告中,广东工业大学CCF学生会员积极与报告嘉宾进行交流互动,报告嘉宾也耐心地答疑解惑。通过此次会议,报告嘉宾们向师生会员描述了当前机器人图形计算中学术领域与工业领域的发展方向和市场需求,建议我们多去探索自己专业领域外的大方向,拓展学术视野。会议加深了广东工业大学CCF师生会员对机器人图形计算的理解,同时也为更多人的科研方式提供参考。
讲座结束后,刘利刚教授、屠长河教授、徐凯教授、胡瑞珍研究员与参会师生进行了合影留恋。

师生合影
参会学生会员感言:
刘佳荣——广东工业大学计算机学院计算机技术2019级研究生
在CCF走进高校活动中,很荣幸能听到这么多专家的专题讲座报告,虽然自己的研究方向与报告主题不同,但交叉学科下的学习拓展了我的科研视角。讲者导师们通过利用自己的研究课题案例向我们描绘了机器人图形计算下面临的工业难题以及解决思路,这让我对学术有了更进一步的理解,同时学会如何思考,如何抓住多因素问题的关键点,主成分等。希望自己能通过研究领域实验去践行这个指导思想,争取早点做出不错的成绩,写出优秀的论文。
林哲——广东工业大学计算机学院电子信息2020级研究生
2020年12月28日,我十分荣幸的在工一216学术报告厅聆听了中国科技大学教授刘利刚、山东大学教授屠长河、国防科技大学教授徐凯、深圳大学特聘研究员胡瑞珍主题为“面向智能机器人的图形计算”的精彩讲座,他们的对机器人3D图形学的介绍条理清晰、生动有序,时常举一些事例,使道理深入浅出,渗透人心,我被深深的吸引了,长达3个半小时的讲座让我受益匪浅。我本身也是研究图像学的,通过这次讲座理论水平得到了提升,对问题的思考角度也增加了。谢谢老师们的学术分享。
郑海利——广东工业大学计算机学院电子信息2020级研究生
今天有幸参加CCF走进高校活动,听取了四篇关于智能机器人图形计算方面的报告。感叹智能化机器人研究发展的迅速,而且越来越走向人们的生活。屠教授主要围绕机器人在三维环境的交互需求,分析多机器人在协作和感知的挑战,提出自己团队的解决方案,打开了全新的思路。刘教授报告了全新的自主场景三维重建方法,进行物体分析和基于物体感知的信息增益分析。两位教授都在不同的角度就环境交互问题做出了特点研究。徐凯教授主要报告装箱问题的变种在线装箱问题,提出带约束的强化学习方法。胡研究员细致讲解强化学习指导机器在复杂环境下的动作。整个过程知识丰富,各有特点。我觉得对于强化学习的方法的优势也可以利用到不同的人工智能方向。
图片来源:广东工业大学计算机学院HPCDS实验室