返回首页
返回首页

CNCC智能机器人技术论坛成功举办
CNCC智能机器人论坛(济南分会场)于10月22日13:30-15:40在线举行,本论坛由山东大学屠长河教授与中国海洋大学董军宇教授发起和组织,邀请山东大学李贻斌教授、国防科技大学徐凯教授、郑州大学徐明亮教授、中国海洋大学何波教授等智能机器人领域专业学者,研讨机器人感知理论和方法、机器人学习的理论和方法、地图构建与定位导航,以及人机自然交互与和谐共融等领域的发展。

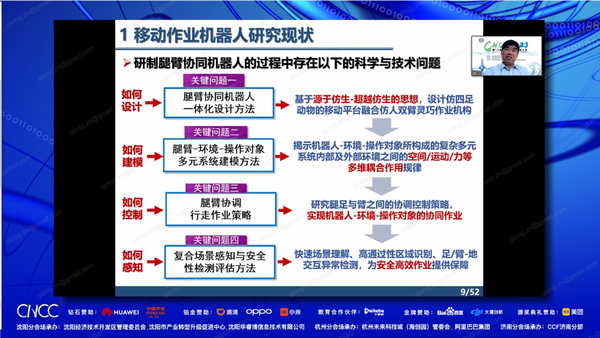
山东大学智能无人系统教育部工程技术中心主任李贻斌教授汇报了腿臂协同机器人相关技术,针对腿臂协同一体化设计、多系统建模、行走协调策略、复杂场景感知与安全评估等关键科学问题,探讨了在如何让机器人兼具移动性与可操作性并且在复杂环境中完成双臂协调的精细操作的技术与方法。
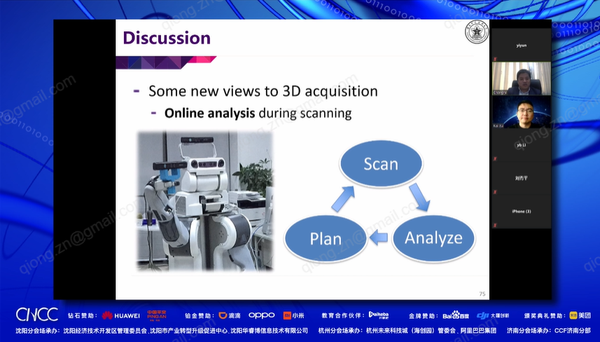
国防科技大学徐凯教授汇报了室内机器人探索式三维视觉感知相关工作,介绍了其团队在机器人室内场景三维几何重建与理解方面的最新研究进展,重点探讨了三维几何处理在未知场景、多机器人协同、机器人交互与感知等应用场景的作用,为构建机器人“智能”提供了新的思路。
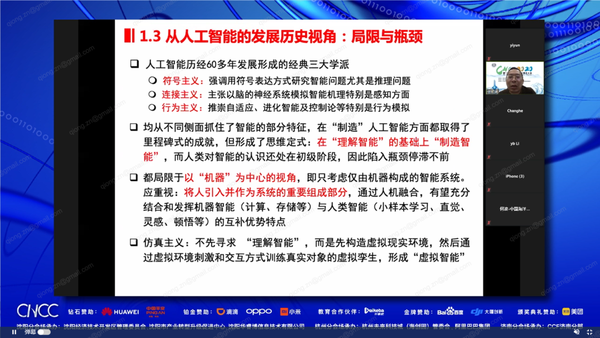
郑州大学徐明亮教授汇报了人机虚实融合智能及应用,介绍了其团队在虚拟人智能行为建模、人机融合的健康计算、人机行为的协同增强等方面的最新研究进展及其在军事国防、医疗健康、社会治理等领域的创新与交叉研究成果。
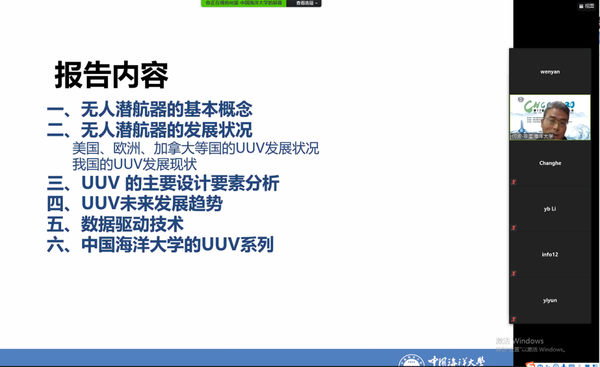
中国海洋大学何波教授汇报了基于数据驱动技术的自主式水下航行器相关工作,重点围绕机器人在海洋领域的应用,针对无人潜航器的基本概念和发展状况进行了详细的阐述,介绍了自主式水下航行器的重要设计要素以及数据驱动技术在自主式水下航行器领域的应用,并对UUV未来自主性提升和多UUV协同等发展趋势进行了展望。

<<< 上一篇
CNCC | 工业互联网之都:新时代的挑战与机遇
<<< 下一篇 CNCC “自然语言处理前沿技术论坛”成功落下